
Indice
Chi coltiva fragole lo sa bene: oltre al clima o la qualità del terreno, l’avversario più ostico da combattere sono le erbe infestanti che, come ospiti indesiderati, si insinuano tra i filari. Crescono in fretta, soffocano le piantine sottraendo nutrienti e luce, alzano la temperatura del microambiente e diventano il rifugio perfetto per parassiti e malattie, che si diffondono con velocità sorprendente. Un problema che mette a rischio la produttività e la salute delle coltivazioni e che i metodi tradizionali non sempre riescono a contenere senza costi elevati o impatti sull’ambiente.
Per affrontare il problema un team di ricercatori cinesi ha sviluppato un robot autonomo a laser per il diserbo dei campi di fragole, una macchina intelligente che sfrutta il modello DIN-LW-YOLO: un sistema di intelligenza artificiale progettato per garantire navigazione autonoma e puntamento laser di estrema precisione. Una soluzione che promette di trasformare la gestione delle erbe infestanti, rendendola più sostenibile ed efficace.
Un robot laser contro le erbe infestanti
Il robot sviluppato dai ricercatori si basa su una piattaforma composta da tre sottosistemi principali, progettati per lavorare in perfetta sinergia. Gli “occhi”, ovvero il sistema di visione, sono rappresentati da una telecamera speciale capace di osservare il campo e catturare immagini ad alta precisione. Il “cervello”, un potente computer di bordo dotato di CPU e GPU, elabora questi dati in tempo reale per distinguere le fragole dalle erbe infestanti. Infine, il “braccio”, un sistema laser guidato da specchi galvanometrici, colpisce con estrema precisione bersagli di dimensioni minime. Tutto il meccanismo è montato su un carro cingolato regolabile in larghezza, simile a un piccolo tank, che gli permette di muoversi agilmente tra i filari senza danneggiare le piantine.
Acquisizione dati e ottimizzazione dell’algoritmo DIN-LW-YOLO
Per insegnare al robot a distinguere fragole ed erbe infestanti, i ricercatori hanno costruito un ampio archivio di dati visivi. Tra aprile e agosto 2023 sono state raccolte 2.153 immagini RGB-D in condizioni operative reali: campi all’aperto, serre e aree ad alta densità di piantumazione, variando fattori come illuminazione, umidità del suolo e presenza di ostacoli. Ogni immagine è stata annotata manualmente da esperti e suddivisa in tre set: training (1.434 immagini), validation (307) e test (312).
Su questa base è stato addestrato DIN-LW-YOLO, una versione evoluta del noto sistema YOLO. L’upgrade ha permesso di migliorare sensibilmente il riconoscimento delle erbe infestanti e la precisione nell’individuare i tubi di irrigazione, fondamentali per guidare la navigazione autonoma. Il risultato? Un robot laser capace di colpire con estrema accuratezza le malerbe libere da ostacoli, riducendo al minimo gli errori.
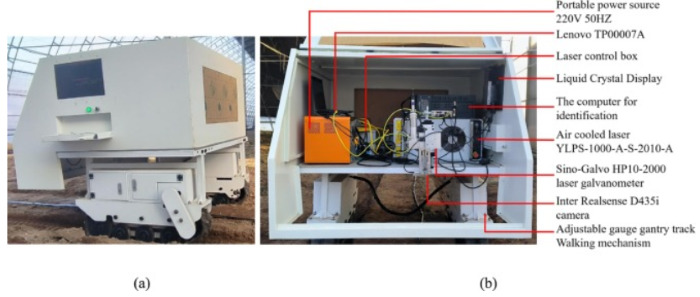
Prototipo di robot per il diserbo laser in fase di sviluppo: (a) Vista esterna del robot per il diserbo laser; (b). Fonte: ScienceDirect
Come lavora il robot
Una volta attivato, il robot lavora in completa autonomia. Si muove lungo i filari seguendo il tubo di irrigazione a goccia come se fosse una rotaia, correggendo la traiettoria a destra o a sinistra per rimanere sul percorso. Nel frattempo, la telecamera registra continuamente immagini che il “cervello” del sistema – il computer di bordo – analizza fotogramma per fotogramma. L’algoritmo individua le erbe infestanti, verificando che non siano coperte da fragole o tubi, così da evitare danni alle colture.
Quando il bersaglio è libero, il software calcola le coordinate esatte e le trasmette al sistema laser. A quel punto, il raggio colpisce la pianta infestante per pochi millisecondi, bruciandola senza intaccare nulla intorno. Terminata l’operazione in un’area, il robot avanza e ripete il ciclo, con una precisione che ricorda un instancabile cecchino agricolo.
Le sfide del riconoscimento in campo aperto
Nonostante i risultati promettenti, il modello DIN-LW-YOLO, non è privo di difficoltà. In condizioni di alta densità vegetativa o con morfologie complesse, il robot può confondere più piante come un unico agglomerato o, al contrario, segmentare erroneamente una singola infestante in più unità, generando falsi positivi. Per ridurre questi errori, i ricercatori stanno lavorando a dataset più ricchi e specifici, con immagini categorizzate separatamente per queste criticità, e l’integrazione di tecniche avanzate di pre e post-elaborazione per affinare la segmentazione.
la sfida è ancora aperta ma test in campo hanno confermato l’efficacia agronomica del sistema, con un 92.6% di efficacia nel diserbo e un contenuto tasso di danno alle colture dell’1.2%, aprendo la strada a un’applicazione su larga scala del robot nella gestione sostenibile delle coltivazioni.
- Leggi anche: Robot da diserbo: quali risultati?
Federica Del Vecchio
© fruitjournal.com