
Indice
Non è una novità: trovare manodopera disponibile proprio nei momenti più delicati della stagione agricola è sempre più complicato. Il problema non riguarda solo la quantità di braccia disponibili, ma la capacità di sincronizzarsi con le implacabili finestre temporali imposte dalla natura. Ritardi nella raccolta, nella potatura o in altre fasi chiave, possono vanificare mesi di lavoro, ridurre la resa, deprezzare i prodotti e generare perdite economiche significative per le aziende. È qui che entra in gioco l’innovazione tecnologica: un team di ricercatori della Washington State University ha sviluppato un braccio robotico per la raccolta delle mele, capace di muoversi tra i rami, individuare i frutti maturi e raccoglierli con precisione, pronto a supportare in futuro anche altre attività quotidiane nei frutteti.
Il braccio robotico “morbido”
Il prototipo, evoluzione di un modello precedente chiamato Roboa, è un braccio morbido e gonfiabile progettato per identificare visivamente una mela e raccoglierla in circa 25 secondi. Proprio per le sue dimensioni contenute, il robot è in grado di muoversi con sorprendente rapidità, estendendosi fino a 38 cm e ritraendosi fino a 26 cm. Opera normalmente a pressioni tra 5 e 10 psi (pounds per square inch), ma può resistere fino a oltre 20 psi, e supporta un carico utile fino a circa un chilogrammo.
Tra le modifiche principali rispetto al modello precedente spiccano un braccio autoportante, pressioni interne più elevate per movimenti più efficaci e un azionamento del tendine alla base per un controllo più semplice. L’obiettivo è chiaro: raccogliere le mele più accessibili in modo rapido ed efficiente, evitando frutti troppo difficili da raggiungere e ottimizzando il lavoro nei frutteti.
Controllo e precisione avanzati
Ma c’è di più. Per aumentare precisione e affidabilità, i ricercatori hanno aggiornato il modello cinematico del braccio robotico, uno strumento fondamentale per prevedere e controllare ogni movimento. I vecchi angoli di beccheggio e rotazione sono stati sostituiti da un angolo di azimut e un angolo di elevazione, riducendo le variazioni improvvise vicino all’asse centrale e rendendo il movimento del braccio più stabile. La sezione di sterzo è stata completamente riprogettata: i tre motori ora lavorano in sincronia e il braccio dispone di un quarto grado di libertà che permette di variare la sua lunghezza, aumentando flessibilità e controllo.
Per garantire stabilità anche di fronte a piccole differenze nella costruzione del braccio, il team ha adottato un controllore adattivo MRAC (Model Reference Adaptive Control), che monitora costantemente i movimenti confrontandoli con quelli previsti e correggendo automaticamente eventuali deviazioni.
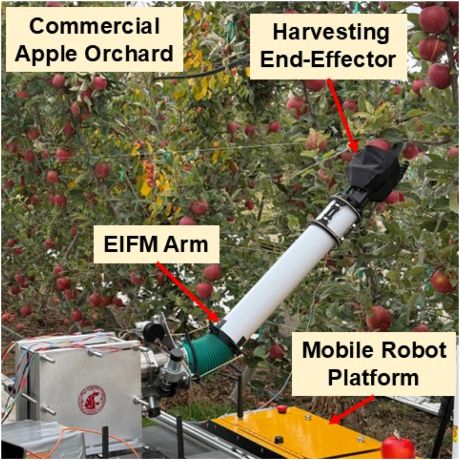
Rappresentazione concettuale di un sistema di braccio manipolatore di tessuto gonfiabile eversibile (EIFM) progettato per realizzare operazioni di frutteto in un ambiente di frutteto commerciale. Fonte: ScienceDirect
Test e risultati
Per testare il robot, i ricercatori hanno utilizzato un sistema di telecamere OptiTrack per monitorare con precisione i movimenti della punta del braccio e della zona di sterzo, integrato da marcatori riflettenti applicati direttamente sul braccio stesso. Cinque telecamere hanno tracciato i marcatori in 3D, mentre sensori montati sui motori hanno registrato dati in tempo reale, permettendo di analizzare ogni minimo spostamento.
Tutti i test sono stati condotti mantenendo una pressione costante di 5 psi nel braccio, sufficiente a garantire velocità, carico utile e durata affidabile del tessuto. I dati raccolti hanno permesso di calcolare con precisione i parametri del sistema e verificare le prestazioni complessive del braccio, confermando che il robot può operare in autonomia nella raccolta delle mele, dimostrando l’efficacia del controllo adattivo applicato a robot morbidi.
Prospettive future
Guardando al futuro, i ricercatori prevedono di portare il robot a un livello ancora più avanzato, migliorando motori e buffer di sterzo flessibile, integrando sistemi di visione per localizzare con precisione sia il braccio sia le mele, e aggiungendo un controller di alto livello in grado di pianificare percorsi ottimali e gestire eventuali disturbi. Un ulteriore passo sarà l’implementazione di una pinza morbida, in grado di completare autonomamente la raccolta dei frutti. In questo modo, il prototipo si trasforma da esperimento di laboratorio a soluzione concreta e pronta per il campo, combinando efficienza, sicurezza e adattabilità, offrendo agli agricoltori un alleato prezioso nella gestione dei frutteti.
- Leggi anche: Cani robot in agricoltura: verso il 5.0
Federica Del Vecchio
© fruitjournal.com